


 4008-622-911
4008-622-911




技術干貨!使用FPGA實現一個直流有刷電機控制器
本篇文章將介紹如何使用FPGA實現一個直流有刷電機控制器,主要包括 速度控制 和 角度控制(好像在無刷電機控制中,習慣將其稱為環,即速度環 和 角度環(位置環))。因此這是一個閉環系統,需要得到系統的反饋,實時得到電機的轉速和角度,所以需要上篇中編碼器模塊的輸出,作為控制器的反饋,通過PID進行調節。
二、控制器框圖設計
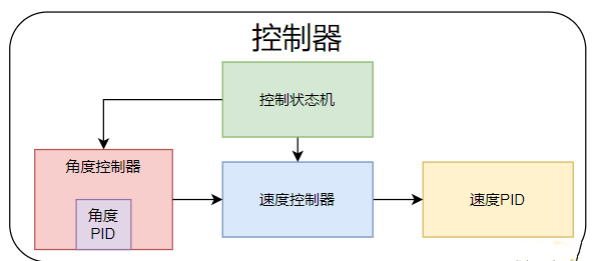
在做設計之前,最好先將功能明確下來,然后繪制簡單的流程框圖,當然這里先將程序實現完了之后,再繪制的流程框圖 ̄□ ̄||,框圖如下,主要由三大模塊組成(控制姿態就不包括在里面了),角度、速度和PID模塊,下面將一一介紹各個模塊的具體細節。
三、PID模塊
PID的原理在之前的文章中有提到過,就不再繼續提起了,本次實現的方式方式和之前實現的方式一樣,將PID系數擴大100倍取整,然后相乘,將得到的結果再右移7位 加速 右移 9位,約等于除以了100。
四、速度控制器
速度控制器里面主要做期望速度的輸出和電機運動方向切換的控制。期望速度主要由外部輸入和方向切換來控制,如果說需要進行方向切換的話,為了保護電機,不能立馬進行電機的轉向,而要等待速度降低到安全速度后,再進行方向切換。
所以如果電機不需要轉向,那么期望速度就是外部設置的速度。
如果需要轉向的話,先將期望速度設置為0,待速度降低到安全速度后,例如5RPM,就切換方向 和 將期望速度設置為外部設置的速度。
module controller_Speed_loop(
input sys_clk_i , //時鐘輸入
input sys_rst_n_i , //復位輸入
input c_speed_loop_en_i , //速度環使能信號
input motor_spin_dir_i , //設置旋轉方向
input[15:0] motor_rpm_set_i , //設置速度
input encoder_direction_i , //電機實際的運動方向
input[15:0] encoder_speed_i , //編碼器速度
output reg c_speed_loop_dir_o , //速度環方向輸出
output reg[15:0] c_speed_loop_rmp_o //速度環RPM輸出
);
五、角度控制器
控制過程和速度控制過程一樣,將當前角度值和期望角度值輸入角度PID進行計算,然后將計算后的結果輸入到速度PID進行計算,得到PWM的變化值。
這一控制回路是比較簡單的,如果說需要在角度旋轉的時候,還需要對速度進行控制的話,就會復雜一點點(串級),等后面有需求了再進行實現。
六、小結
本次實現的控制器 和 上次實現的 編碼器,共同組成了一個簡單的電機控制器,可用于對電機的速度 和 角度進行控制。
top層的控制信號如下,在速度模式下,只需要設置rmp的值,電機就可以進行轉動,而在角度模式下,需要先設置旋轉的角度值,然后在使能角度旋轉,電機就會旋轉對應的角度后,停止。
//控制信號
.motor_mode_set_i ( motor_mode_set ), //設置電機模式 2'b00 = 速度模式 2'b01 = 角度模式
.motor_spin_dir_i ( motor_spin_dir ), //電機運動方向控制 1'b0 正向 1'b1 反向
.motor_rpm_set_i ( motor_rpm_set ), //設置電機轉速 RPM
.motor_acc_set_i ( motor_acc_set ), //設置電機加速度
.motor_angle_en_i ( motor_angle_en ), //角度旋轉使能
.motor_angle_ack_o ( motor_angle_ack ), //角度旋轉應答
.motor_angle_set_i ( motor_angle_set ), //設置電機旋轉角度


相關推薦
-
前10熱門FPGA芯片型號匯總")
-
Xilinx(賽靈思)前10熱門FPGA芯片型號匯總
Xilinx(賽靈思)是全球領先的可編程邏輯完整解決方案的供應商。Xilinx研發、制造并銷售范圍廣泛的高級集成電路、軟件設計工具以及作為預定義系統級功能的IP(Intellectual Property)核。Xilinx(賽靈思)產品應用廣泛,主要涵蓋了安全互聯汽車、移動設備、工業物聯網、智慧城市、智慧家居、通信基礎設施等市場與應用領域。本文將介紹本周Xilinx(賽靈思)前10熱門型號,具體型號如下:1、XC7A100T-2FGG484CXC7A100T-2FGG484C是賽靈思Xilinx公司的一款FPGA芯片,具有以下技術參數:芯片型號:XC7A100T-2FGG484C2. 芯片封裝:FGG4843. 芯片工藝:28nm4. 芯片邏輯單元數:101,2615. 芯片DSP單元數:2406. 芯片BRAM容量:4.9 Mb7. 芯片I/O數量:332XC7A100T-2FGG484C廣泛應用于高性能計算、通信、視頻、圖像處理、醫療、工業控制等領域。它可以實現高速數據處理、信號處理、圖像處理、數字信號處理等功能。同時,XC7A100T-2FGG484C還具有低功耗、高可靠性、易于設計和調試等優點,可以滿足各種應用場景的需求。2、XC7A100T-2CSG324IXC7A100T-2CSG324I是賽靈思Xilinx公司的一款FPGA芯片,具有以下技術參數:– 芯片型號:XC7A100T-2CSG324I– 芯片系列:Artix-7– 芯片封裝:CSG324– 芯片溫度范圍:-40C ~ 100C– 芯片邏輯單元數量:101,440– 芯片存儲單元數量:4,860Kb– 芯片DSP48E1數量:240– 芯片IO數量:324XC7A100T-2CSG324I廣泛應用于高性能數字信號處理、高速通信、視頻處理、醫療設備、工業自動化等領域。其主要應用包括:– 通信系統:用于實現高速數據傳輸、信號處理、協議轉換等功能。– 視頻處理:用于實現高清視頻采集、圖像處理、視頻編解碼等功能。– 工業自動化:用于實現控制、監測、數據采集等功能。– 醫療設備:用于實現醫療圖像處理、信號處理、數據采集等功能。3、XC7A35T-1FTG256IXC7A35T-1FTG256I是賽靈思Xilinx公司的一款FPGA芯片,具有以下技術參數:– 芯片型號:XC7A35T-1FTG256I– 芯片系列:Artix-7– 芯片封裝:FTG256– 芯片工藝:28nm– 邏輯單元數目:33,280– 存儲單元數目:1,800Kb– DSP單元數目:90– 最大時鐘頻率:450MHz– 支持通信協議:PCI Express, Ethernet, USB, CAN, I2C, SPI等XC7A35T-1FTG256I芯片廣泛應用于通信、工業控制、醫療、航空航天等領域,主要用于高速數據處理、信號處理、圖像處理、運動控制等方面。例如,可以用于設計高速數據采集卡、高速圖像處理器、高速運動控制器等。4、XC6SLX25-3FTG256CXC6SLX25-3FTG256C是賽靈思(Xilinx)公司推出的一款FPGA器件,具有以下技術參數:– 器件類型:Spartan-6– 邏輯單元數量:24,576– 存儲單元數量:1,536Kb– 最大用戶I/O數量:200– 最大時鐘頻率:300MHz– 工作溫度范圍:-40C ~ 100C– 封裝形式:FTG256CXC6SLX25-3FTG256C主要應用于數字信號處理、通信、視頻處理、醫療設備、工業控制等領域。其具有低功耗、高性能、可編程性強等特點,能夠滿足各種復雜應用的需求。5、XC6SLX25T-3CSG324IXC6SLX25T-3CSG324I是一款賽靈思(Xilinx)公司生產的FPGA芯片,具有以下技術參數:– 器件系列:Spartan-6– 邏輯單元數目:24,576– 存儲單元數目:1,536Kb– 最大時鐘頻率:300MHz– 工藝:45nm– 封裝:CSG324XC6SLX25T-3CSG324I主要應用于數字信號處理、通信、圖像處理、視頻處理、工業控制等領域。它可以實現高速數據傳輸、信號處理、算法加速等功能,具有靈活性高、可編程性強、功耗低等優點。常見的應用場景包括高速數據采集、圖像處理、視頻編解碼、音頻處理、機器視覺、醫療設備、工業自動化等。6、XC6SLX9-3CSG225IXC6SLX9-3CSG225I是一款賽靈思(Xilinx)公司生產的FPGA芯片,具有以下技術參數:– 邏輯單元數(Look-Up Tables,LUTs):576個– 存儲單元數(Flip-Flops):1152個– 內置BRAM(Block RAM):18個,總容量為72Kb– 最大時鐘頻率:150MHz– 支持的I/O標準:LVCMOS 3.3V、LVCMOS 2.5V、LVCMOS 1.8V、LVDS、HSTL、SSTL、PCI、PCI-X、GTP等XC6SLX9-3CSG225I廣泛應用于數字信號處理、通信、圖像處理、音頻處理、工業控制等領域。它可以用于設計各種數字電路,如數字濾波器、FFT、FIR、IIR、卷積等算法,還可以用于實現各種通信協議,如以太網、USB、PCI等。此外,XC6SLX9-3CSG225I還可以用于實現各種控制系統,如電機控制、機器人控制、自動化控制等。7、XC6SLX9-2CSG324CXC6SLX9-2CSG324C是一款賽靈思(Xilinx)公司生產的FPGA芯片,具有以下技術參數:– 芯片型號:XC6SLX9-2CSG324C– FPGA系列:Spartan-6– 邏輯單元數目:9,152– 存儲單元數目:36,608– 最大時鐘頻率:150 MHz– I/O數量:324– 工作電壓:1.14V – 1.26V– 工作溫度范圍:-40C ~ 100C– 封裝形式:CSG324CXC6SLX9-2CSG324C廣泛應用于數字信號處理、通信、圖像處理、音頻處理、工業控制等領域。其主要應用包括:– 通信:XC6SLX9-2CSG324C可用于實現各種通信協議,如以太網、USB、PCI Express等。– 數字信號處理:XC6SLX9-2CSG324C可用于實現各種數字信號處理算法,如濾波、FFT、DCT等。– 圖像處理:XC6SLX9-2CSG324C可用于實現各種圖像處理算法,如圖像濾波、邊緣檢測、圖像壓縮等。– 音頻處理:XC6SLX9-2CSG324C可用于實現各種音頻處理算法,如音頻濾波、音頻壓縮等。– 工業控制:XC6SLX9-2CSG324C可用于實現各種工業控制算法,如PID控制、模糊控制等。8、XC6SLX9-2FTG256IXC6SLX9-2FTG256I是賽靈思Xilinx公司推出的一款FPGA芯片,具有以下技術參數:– 邏輯單元數:6,240– 存儲單元數:18,432– DSP48A1單元數:4– 最大時鐘頻率:150 MHz– I/O數量:109XC6SLX9-2FTG256I主要應用于數字信號處理、通信、圖像處理、視頻處理、嵌入式系統等領域。它可以實現高速數據處理、高速通信、高清視頻處理等功能,具有靈活性和可編程性強的特點。常見的應用場景包括無線通信、高速網絡、醫療設備、工業控制等。9、XC6SLX16-3FTG256IXC6SLX16-3FTG256I是賽靈思Xilinx公司生產的一款FPGA芯片,其技術參數和應用如下:技術參數:– FPGA系列:Spartan-6– FPGA型號:XC6SLX16– 工藝:45nm– 邏輯單元數目:1,280– 存儲單元數目:32,768– DSP48A1數目:20– 最大用戶I/O數目:216– 最大時鐘頻率:250MHz– 工作電壓:1.14V-1.26V– 封裝:FTG256IXC6SLX16-3FTG256I可以應用于各種數字電路設計,如通信、圖像處理、音頻處理、控制系統等。其高性能、低功耗、可編程性等特點使其成為廣泛應用于各種領域的理想芯片。10、XC7Z035-2FFG676IXC7Z035-2FFG676I是賽靈思Xilinx公司的一款FPGA芯片,具有以下技術參數:– 芯片型號:XC7Z035-2FFG676I– 芯片系列:Zynq-7000– FPGA類型:可編程邏輯器件– FPGA架構:ARM Cortex-A9– FPGA邏輯單元數:53,200– FPGA存儲單元數:1,300Kb– FPGA時鐘速度:667MHz– FPGA I/O數量:200– FPGA RAM容量:512KB– FPGA存儲器類型:DDR3 SDRAM– FPGA工作電壓:0.95V ~ 1.05V– 芯片封裝:FFG676XC7Z035-2FFG676I廣泛應用于嵌入式系統、高性能計算、網絡通信等領域。其主要應用包括:– 無線通信系統– 視頻處理系統– 工業自動化控制系統– 醫療設備– 航空航天設備– 軍事設備– 汽車電子系統– 智能家居系統– 人工智能系統以上就是本周Xilinx(賽靈思)前10熱門型號,如有采購需求可通過聯系我司。
-

-
如果我國所有軍備芯片只有14NM,美國軍備芯片是5NM,那么在戰爭上的差距會體現在什么地方?
軍備芯片差距,戰爭中的影響軍備芯片的重要性軍備芯片是現代戰爭中最為重要的物資之一,它們是各種武器系統中的“大腦”,掌握著戰爭的關鍵,因此,其性能的優劣直接影響著軍事實力的強弱。芯片制程對戰爭的影響芯片制程是芯片性能的決定因素,制程越小,芯片性能越好。美國軍備芯片的制程已經達到了5納米,而我國的軍備芯片制程僅為14納米,這種制程差距對于戰爭有著重要的影響。制程差距對戰爭的具體影響1. 電子對抗的能力美國軍備芯片制程的優勢使得其電子對抗能力更為強大,攻擊性更強,能夠更好地干擾和破壞敵方通信系統,從而在戰爭中取得更多優勢。2. 武器系統的精度軍備芯片的制程差距也會對武器系統的精度產生影響。制程更小的芯片可以提供更高的計算速度和更精確的數據處理能力,使得武器系統的精度更高,攻擊敵方目標更為精準。3. 戰場指揮的效率戰爭中,指揮控制是至關重要的環節。芯片制程的優劣也會影響到指揮控制的效率。制程更小的芯片提供了更快的計算速度和更高的數據處理能力,可以更快地獲取戰場信息,更快地做出決策。可以看出,軍備芯片制程的差距不僅僅是一種技術制高點的競爭,更是影響到戰爭勝負的重要因素。作為擁有大國崛起夢想的中國,我們必須加強軍備芯片的研發,縮小與美國的差距,才能真正提高我國的軍事實力,讓中國在國際舞臺上更加自信地發聲。
 哦! 它是空的。
哦! 它是空的。